Productos

QA04, Mornsun, Convertidor DC/DC para controlador IGBT, 12V a +15V/-8V DC-DC, I/O Aislacion, test de voltaje 3000 VAC
11 de septiembre de 2024
ATV930D45N4, Schneider, reparaciones, Drive, 3X380/480VCA 88A 45KW ETHERNET
12 de septiembre de 2024


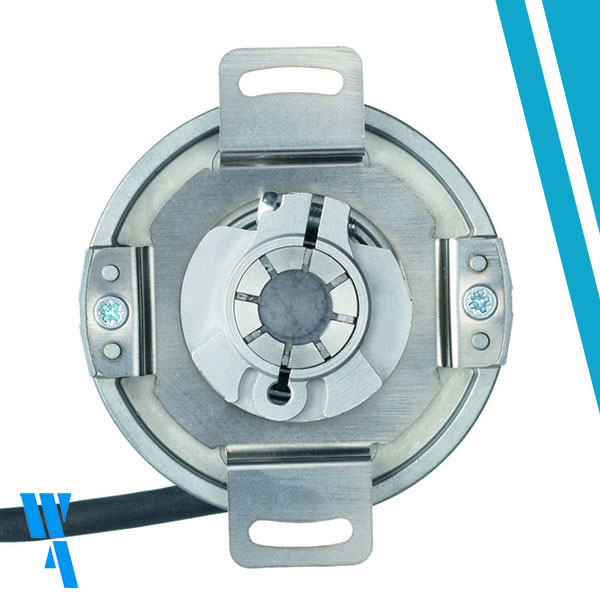
DBS60E-THFA01024, Sick, Tipo de codificador. Incremental; Tipo de salida. Cuadratura (incremental); Pulsos por revolución. 1024; Voltaje – Suministro. 4.5V ~ 30V.
Description
Medición – Velocidad y aceleración, Medición – Ángulo, inclinación y movimiento de giro, Determinar la posición – Determinación de la posición en 1D
| Impulsos por revolución | 1.024 |
| Paso de medición | ≤ 90°, eléctrico/impulsos por revolución |
| Desviación del paso de medición | ± 18° /impulsos por revolución |
| Límites de error | Divergencia del paso de medición x 3 |
| Grado de exploración | ≤ 0,5 ± 5% |
Interfaz:
| Interfaz de comunicación | Incremental |
| Detalle de la interfaz de comunicación | TTL / HTL 1) |
| Número de canales de señal | 6 canales |
| Tiempo de inicialización | < 5 ms 2) |
| Frecuencia de salida | + 300 kHz 3) |
| Corriente de carga | ≤ 30 mA, por canal |
| Consumo de energía | ≤ 0,5 W (sin carga) |
Datos Electricos
| Tipo de conexión | Conector macho, M23, 12 polos, radial |
| Tensión de alimentación | 4,5 … 30 V |
| Señal de referencia, número | 1 |
| Señal de referencia, posición | 90°, Unión eléctrica, lógica, con A y B |
| Protección frente a inversión de polaridad | ✔ |
| Resistencia a cortocircuitos de las salidas | ✔ 1) |
| MTTFd: Tiempo medio hasta un fallo peligroso | 500 años (EN ISO 13849-1) 2) |
Datos Mecánicos:
| Características mecánicas | Eje hueco pasante, Sujeción delantera |
| Diámetro del eje | 15 mm |
| Tipo de brida / par de apoyo | Par de apoyo de 2 lados, agujero largo, círculo de agujeros 63 mm – 83 mm |
| Peso | + 0,25 kg 1) |
| Material, eje | Acero inoxidable |
| Material de la brida | Aluminio |
| Material de la carcasa | Aluminio |
| Par de arranque | + 0,5 Ncm (+20 °C) |
| Par de operación | 0,4 Ncm (+20 °C) |
| Movimiento admisible del eje estático | ± 0,3 mm (radial)
± 0,5 mm (axial) 2) |
| Movimiento admisible del eje dinámico | ± 0,1 mm (radial)
± 0,2 mm (axial) 2) |
| Velocidad de servicio | 6.000 min⁻¹ 3) |
| Velocidad máxima de servicio | 9.000 min⁻¹ 4) |
| Momento de inercia del rotor | 50 gcm² |
| Tiempo de vida de los cojinetes | 3,6 x 109 revoluciones |
| Aceleración angular | ≤ 500.000 rad/s² |
Mas informacion?
>>>dataSheet_DBS60E-THFA01024_1072261_esdataSheet_DBS60E-THFA01024_1072261_es